 更新情報履歴
更新情報履歴
HOME >> 更新情報履歴 No.14 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
更新情報履歴 No.14
- ■ 卓上レイアウトで楽しもう 自動運転 その23 ( 2020/3/1)
 クローバー路線での自動運転について、やっと満足できるレベルまで持つ込むことが出来ました。 そこで、最初から予定していた2列車の同時運転に挑戦しました。 注目点は 十字路の交互運転です。
クローバー路線での自動運転について、やっと満足できるレベルまで持つ込むことが出来ました。 そこで、最初から予定していた2列車の同時運転に挑戦しました。 注目点は 十字路の交互運転です。- ■ 卓上レイアウトで楽しもう 自動運転 その22 (2020/2/26)
 先回の「卓上レイアウトで楽しもう 自動運転 その21」で、モータドライバを壊してしまいました。 その後、代わりのドライバが準備と調査が出来ましたので、自動運転の実験を再開しました。
先回の「卓上レイアウトで楽しもう 自動運転 その21」で、モータドライバを壊してしまいました。 その後、代わりのドライバが準備と調査が出来ましたので、自動運転の実験を再開しました。- ■ Arduino Nano Every のPWM出力を調べる (2020/2/22)
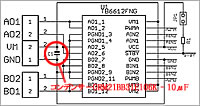
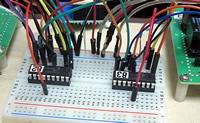
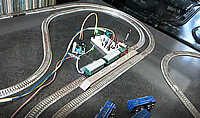
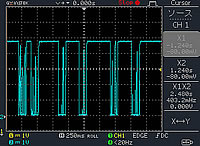
 先回の報告自動運転 その21で、給電制御を実施していたモータドライバを焼いてしまった。 今までの方法を諦めて新しいモータドライバを使ってみることにした。 そして、確認のために、PWM 出力波形を観察していたところ、危うく失敗を重ねるところであった。 ここでは、新しく取り組んだドライバセットの工作とPWM 出力波形の観察結果を報告する。
先回の報告自動運転 その21で、給電制御を実施していたモータドライバを焼いてしまった。 今までの方法を諦めて新しいモータドライバを使ってみることにした。 そして、確認のために、PWM 出力波形を観察していたところ、危うく失敗を重ねるところであった。 ここでは、新しく取り組んだドライバセットの工作とPWM 出力波形の観察結果を報告する。- ■ 卓上レイアウトで楽しもう 自動運転 その21 (2020/2/19)
 レイアウトをまたまた変更しました。中央部のクロスを中心とした四葉のクローバーの形のレイアウトです。 この交差点を中心として、周辺部をグルグルと巡回させる走行パターンを考えています。
レイアウトをまたまた変更しました。中央部のクロスを中心とした四葉のクローバーの形のレイアウトです。 この交差点を中心として、周辺部をグルグルと巡回させる走行パターンを考えています。- ■ 卓上レイアウトで楽しもう 自動運転 その20 (2020/2/11)
 卓上レイアウトの自動運転において、いよいよ Arduino Nano Every を使って制御を実施しました。 先回のイライラはどこ吹く風ですんなりと作動するようになりました。
卓上レイアウトの自動運転において、いよいよ Arduino Nano Every を使って制御を実施しました。 先回のイライラはどこ吹く風ですんなりと作動するようになりました。- ■ 卓上レイアウトで楽しもう 自動運転 その19 (2020/2/10)
 システムの簡素化対策の一環として、制御マイコンを取り扱いが容易な Arduino Nano Every を使ってみることにする。 でも、今回も使いこなすまでには、ウロウロしてしまった。 原因は単純でしたが・・・・・・・・・!
システムの簡素化対策の一環として、制御マイコンを取り扱いが容易な Arduino Nano Every を使ってみることにする。 でも、今回も使いこなすまでには、ウロウロしてしまった。 原因は単純でしたが・・・・・・・・・!- ■ 卓上レイアウトで楽しもう 自動運転 その18 (2020/2/6)
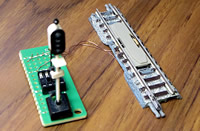 システムの簡素化対策の一環として、信号機用制御マイコンを独立させる工作の第2弾として、スラブレール用センサのジャンク品を活用して信号機に仕立てることにしました。
システムの簡素化対策の一環として、信号機用制御マイコンを独立させる工作の第2弾として、スラブレール用センサのジャンク品を活用して信号機に仕立てることにしました。- ■ 卓上レイアウトで楽しもう 自動運転 その17 (2020/2/5)
 今回は、システムの簡素化対策の一環として、信号機用制御マイコンを独立させる工作を実施しました。
今回は、システムの簡素化対策の一環として、信号機用制御マイコンを独立させる工作を実施しました。 - ■ 卓上レイアウトで楽しもう 自動運転 その16 (2020/2/1)
- 今回は、その15で実施したシステムを少し簡素化しようと考え、その方策として一列車運行モードを実験しましたので報告します。
- ■ 卓上レイアウトで楽しもう 自動運転 その15 (2020/1/28)
 自動運転その14にて紹介したレイアウトに、信号機を組込みました。 そして通過センサの機能も組み込むことにしました。 でも、今回もプログラム部分で、四苦八苦したうえでやっと順調に作動させることが出来ました。
自動運転その14にて紹介したレイアウトに、信号機を組込みました。 そして通過センサの機能も組み込むことにしました。 でも、今回もプログラム部分で、四苦八苦したうえでやっと順調に作動させることが出来ました。- ■ 卓上レイアウトで楽しもう 自動運転 その14 (2020/1/20)
 自動運転その13にて紹介したレイアウトに、予定していたリバース運転を組込むことにしましょう。 でも、あちこちでつまずき、四苦八苦したうえでやっと順調に作動させることが出来ました。
自動運転その13にて紹介したレイアウトに、予定していたリバース運転を組込むことにしましょう。 でも、あちこちでつまずき、四苦八苦したうえでやっと順調に作動させることが出来ました。 - ■ PWM制御のコントローラとコンデンサの関係 (2020/1/12)
 卓上レイアウトで楽しもう 自動運転 その13-2では、モータドライバユニットと、PWM 制御式のパワーユニットの相性は合わないので使用出来ません、とオシロでの確認なしに結論していました。 そこで、波形観察より、実際の様子を見ることにしました。
卓上レイアウトで楽しもう 自動運転 その13-2では、モータドライバユニットと、PWM 制御式のパワーユニットの相性は合わないので使用出来ません、とオシロでの確認なしに結論していました。 そこで、波形観察より、実際の様子を見ることにしました。- ■ 卓上レイアウトで楽しもう 自動運転 その13-2 ( 2020/1/9)
 今回のレイアウトは、外側と内側の周回路に、リバースサークルを追加したものです。その自動運転の仕掛けを紹介しましょう。また、PWM制御方式のパワーユニットが使えない事も分かりました。その原因はモータドライバにありました。
今回のレイアウトは、外側と内側の周回路に、リバースサークルを追加したものです。その自動運転の仕掛けを紹介しましょう。また、PWM制御方式のパワーユニットが使えない事も分かりました。その原因はモータドライバにありました。- ■ 卓上レイアウトで楽しもう 自動運転 その13-1 ( 2020/1/8)
 すでに、松の内も明けてしまいましたが、ともかく 新年あけましておめでとうございます。
すでに、松の内も明けてしまいましたが、ともかく 新年あけましておめでとうございます。
昨年の暮れは、トラブル対策が完了できないままに、時間切れとなってしましました。 Bトレが駄目なら、トーマス・ランドにしようと目論んで、新しいレイアウトに変更しました。- ■ 卓上レイアウトで楽しもう 自動運転 その12 ( 2019/12/31)
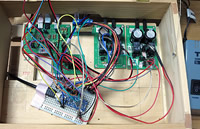
 今回の内容は、レイアウトを少し修正してスッキリとさせる事と、制御機器を箱の中に収めて見栄えが良くなるように工作しました。
今回の内容は、レイアウトを少し修正してスッキリとさせる事と、制御機器を箱の中に収めて見栄えが良くなるように工作しました。- ■ 卓上レイアウトで楽しもう 自動運転 その11 ( 2019/12/22)
 反対側のホームに制御を追加し、さらももうひと列車を入線させて、合計3列車を同時運転させようとの試みの続きです。 今回は、他方のホームに停車している列車がある場合は、そちらの列車も同時に出発させようとするものです。
反対側のホームに制御を追加し、さらももうひと列車を入線させて、合計3列車を同時運転させようとの試みの続きです。 今回は、他方のホームに停車している列車がある場合は、そちらの列車も同時に出発させようとするものです。- ■ 卓上レイアウトで楽しもう 自動運転 その10 ( 2019/12/21)
 先回と同じレイアウトと制御ロジックを使用して反対側のホームにも制御を追加しました。 さらももうひと列車を入線させて、合計3列車を同時運転させようと試みましたが、ことはそう簡単ではありませんでした。
先回と同じレイアウトと制御ロジックを使用して反対側のホームにも制御を追加しました。 さらももうひと列車を入線させて、合計3列車を同時運転させようと試みましたが、ことはそう簡単ではありませんでした。- ■ 卓上レイアウトで楽しもう 自動運転 その9 ( 2019/12/17)
 今回の内容は、先回と同じレイアウトを使用して制御ロジックを変更してみました。なんとか多くの列車を同時に走らせたいという狙いのもとに、手始めといて追い抜きロジックを考えてみました。マイコンもPIC16F1827を使い、C言語で記述しました。
今回の内容は、先回と同じレイアウトを使用して制御ロジックを変更してみました。なんとか多くの列車を同時に走らせたいという狙いのもとに、手始めといて追い抜きロジックを考えてみました。マイコンもPIC16F1827を使い、C言語で記述しました。- ■ 卓上レイアウトで楽しもう 自動運転 その8 ( 2019/12/10)
 KATO のチビ凸用動力ユニットが発売されました。 今回はこのモデルが楽しめるようなレイアウトにしてみました。
KATO のチビ凸用動力ユニットが発売されました。 今回はこのモデルが楽しめるようなレイアウトにしてみました。 - ■ 卓上レイアウトで楽しもう 自動運転 その7の4 ( 2019/12/5)
 自動運転 その7の2のレイアウトでは運行状態を、その3ではソフトを紹介しましたが、今回は構成するハードを紹介しましょう。
自動運転 その7の2のレイアウトでは運行状態を、その3ではソフトを紹介しましたが、今回は構成するハードを紹介しましょう。- ■ 卓上レイアウトで楽しもう 自動運転 その7の3 ( 2019/12/3)
 自動運転 その7の2のレイアウトでは運行状態を紹介しましたが、今回はその運行パターンとプログラムを紹介しましょう。
自動運転 その7の2のレイアウトでは運行状態を紹介しましたが、今回はその運行パターンとプログラムを紹介しましょう。- ■ 卓上レイアウトで楽しもう 自動運転 その7の2 ( 2019/12/2)
 自動運転 その7の1のレイアウトに於いて、どの様な走行パターンが考えられるのか検討してみました。
自動運転 その7の1のレイアウトに於いて、どの様な走行パターンが考えられるのか検討してみました。- ■ 卓上レイアウトで楽しもう 自動運転 その7の1 ( 2019/11/26)
 今回は、少しグレードアップさせました。自動運転は実施出来ていませんが、その予備実験の段階ですので「その7の1」としています。
今回は、少しグレードアップさせました。自動運転は実施出来ていませんが、その予備実験の段階ですので「その7の1」としています。 - ■ 卓上レイアウトで楽しもう 自動運転 その6 ( 2019/11/24)
 今回は、リバース線のあるレイアウトを実験してみました。 リバース線のスムースな制御と速度設定ボリュームによる走行速度の制御法について実験しました。
今回は、リバース線のあるレイアウトを実験してみました。 リバース線のスムースな制御と速度設定ボリュームによる走行速度の制御法について実験しました。- ■ 卓上レイアウトで楽しもう 自動運転 その5 ( 2019/11/18)
 今回は、自動運転その4に簡単なヤードを設け、手動でのポイント操作であるが、そこからの電車の出入りが可能なレイアウトを実験してみました。
今回は、自動運転その4に簡単なヤードを設け、手動でのポイント操作であるが、そこからの電車の出入りが可能なレイアウトを実験してみました。 - ■ 卓上レイアウトで楽しもう 自動運転 その4 ( 2019/11/17)
 今回は、自動運転その3に信号機を追加し、発車と停車時に速度制御を追加しました。 また、レイアウト上にストラクチャを置い飾ってみました。
今回は、自動運転その3に信号機を追加し、発車と停車時に速度制御を追加しました。 また、レイアウト上にストラクチャを置い飾ってみました。 - ■ 卓上レイアウトで楽しもう 自動運転 その3 ( 2019/11/16)
 自動運転その3は、ポイント制御と速度制御のトライのために、レイアウトと小判型に変更して実験することにしました。
自動運転その3は、ポイント制御と速度制御のトライのために、レイアウトと小判型に変更して実験することにしました。- ■ 卓上レイアウトで楽しもう 自動運転 その2 ( 2019/11/11)
 先回、単純な一方向周回路パターンで走らせました。 今回はこれに制御回路をひとつ追加して、4個の閉塞区間と二つの停車ホームを設定しました。 制御方法は同じです。
先回、単純な一方向周回路パターンで走らせました。 今回はこれに制御回路をひとつ追加して、4個の閉塞区間と二つの停車ホームを設定しました。 制御方法は同じです。- ■ 卓上レイアウトで楽しもう 自動運転 その1 ( 2019/11/10)
 準備した制御機器をレイアウトに組み込んでテストしてみましょう。 最初は、単純な一方向周回路パターンをで走らせてみます。
準備した制御機器をレイアウトに組み込んでテストしてみましょう。 最初は、単純な一方向周回路パターンをで走らせてみます。- ■ 卓上レイアウトで楽しもう TCSセンサの信号出力 ( 2019/11/5)
 気になっていたTCSワンタッチセンサの信号出力を調査しました。 やはり、不安定な事がわかりましたので、レールセンサを使用する事にしました。
気になっていたTCSワンタッチセンサの信号出力を調査しました。 やはり、不安定な事がわかりましたので、レールセンサを使用する事にしました。 - ■ 卓上レイアウトで楽しもう 部品を揃える ( 2019/11/4)
 まず最初に必要な部品を揃えます。 前提として、配線類はブレッドボード上に構成することを考えていますので、それに合った準備をしていきます。
まず最初に必要な部品を揃えます。 前提として、配線類はブレッドボード上に構成することを考えていますので、それに合った準備をしていきます。- ■ 卓上レイアウトで楽しもう KATOの新動力ユニット ( 2019/11/1)
 KATOより新しい動力ユニットを採用したポケットライン・シリーズが発売されたので入手しました。 レイアウトはこたつの天板を利用した急増の卓上レイアウトです。こたつ天板を利用した卓上レイアウトで走らせているうちにに、またまた新しいテーマを見つけてしまいました。 そうだ、このミニレイアウトの上で、自動運転を楽しもう !
KATOより新しい動力ユニットを採用したポケットライン・シリーズが発売されたので入手しました。 レイアウトはこたつの天板を利用した急増の卓上レイアウトです。こたつ天板を利用した卓上レイアウトで走らせているうちにに、またまた新しいテーマを見つけてしまいました。 そうだ、このミニレイアウトの上で、自動運転を楽しもう !