 更新情報履歴
更新情報履歴
HOME >> 更新情報履歴 No.8 1 2 3 4 5 6 7 8 9
更新情報履歴 No.8
- ■ ポイントの通電特性を測定する その4 ( 2017/11/15)
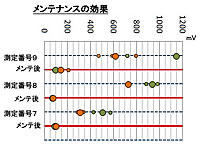
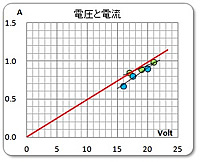
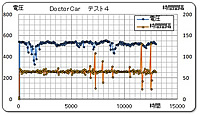
 今回は KATO 製のポイントについて、メンテンナスを実施し、電圧降下量を比較してみました。 また、調査の結論としてKATO製に変更する方向で検討することにした。
今回は KATO 製のポイントについて、メンテンナスを実施し、電圧降下量を比較してみました。 また、調査の結論としてKATO製に変更する方向で検討することにした。- ■ ポイントの通電特性を測定する その3 ( 2017/11/15)
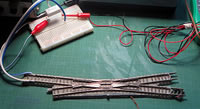
 今回は TOMIX 製のポイントについて、メンテンナス効果を明確にするために、電圧降下量を測定して比較してみました。
今回は TOMIX 製のポイントについて、メンテンナス効果を明確にするために、電圧降下量を測定して比較してみました。- ■ ポイントの通電特性を測定する その2 ( 2017/11/13)
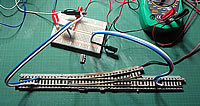
 ポイントの通電性能を判断するために、ポイントでの電圧降下量と抵抗値を測定してみました。先回測定したKATO 製ポイントに引き続き、今回は TOMIX 製のポイントを測定しました。
ポイントの通電性能を判断するために、ポイントでの電圧降下量と抵抗値を測定してみました。先回測定したKATO 製ポイントに引き続き、今回は TOMIX 製のポイントを測定しました。- ■ ポイントの通電特性を測定する その1 ( 2017/11/11)
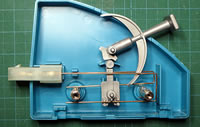
 ポイントの通電性能を判断するために、ポイントでの電圧降下量と抵抗値を測定してみました。
ポイントの通電性能を判断するために、ポイントでの電圧降下量と抵抗値を測定してみました。- ■ KATO製ポイントの構造 ( 2017/11/7)
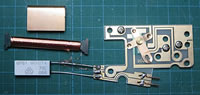 KATO製ポイントについて、分解して内部の構造を調査しよう。
KATO製ポイントについて、分解して内部の構造を調査しよう。- ■ KATO製ポイントの動作特性 その2 ( 2017/11/5)
 KATO製のポイント関係に関する製品群の特性を調べているが、先回の続きとして、複数のポイントの同時駆動の場合について作動状態を観察する。
KATO製のポイント関係に関する製品群の特性を調べているが、先回の続きとして、複数のポイントの同時駆動の場合について作動状態を観察する。- ■ KATO製ポイントの動作特性 ( 2017/11/4)
 KATO製のポイント関係に関する製品群の特性を調べているが、今回は、ポイントスイッチを使って作動状態を観察した。
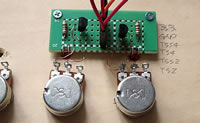
KATO製のポイント関係に関する製品群の特性を調べているが、今回は、ポイントスイッチを使って作動状態を観察した。- ■ KATO製ポイントスイッチの調査 ( 2017/10/31)
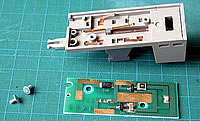
 KATO製のポイント関係に関する製品群の特性を調べようと考えている。今回はポイントスイッチの分解調査を実施した。
KATO製のポイント関係に関する製品群の特性を調べようと考えている。今回はポイントスイッチの分解調査を実施した。- ■ KATO製パワーパック Standard S の調査 ( 2017/10/31)
 KATO製のポイント関係に関する製品群の特性を調べようと考えている。まずはおお元となるパワーパックから分解調査を実施した。
KATO製のポイント関係に関する製品群の特性を調べようと考えている。まずはおお元となるパワーパックから分解調査を実施した。- ■ ローカル線と登山鉄道 (2017/10/29)
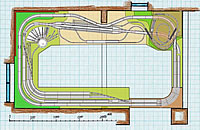
 今回は、ローカル線と登山鉄道について、その造作を報告します。
今回は、ローカル線と登山鉄道について、その造作を報告します。- ■ 機関区の造作 (2017/10/28)
 今回は、機関区について、その造作を報告します。
今回は、機関区について、その造作を報告します。- ■ ヤードの造作 (2017/10/28)
 今回は、ヤードゾーンについて、その造作を報告します。
今回は、ヤードゾーンについて、その造作を報告します。- ■ 電力線の配線 (2017/10/27)
 今回は、電力線の配線について、その造作を報告します。
今回は、電力線の配線について、その造作を報告します。- ■ 跳ね上げ式ブリッジの造作 (2017/10/26)
 今回は、跳ね上げ式ブリッジ部について、その造作を報告します。
今回は、跳ね上げ式ブリッジ部について、その造作を報告します。- ■ 都市部と山岳部の造作 (2017/10/25)
 今回は、都市部と山岳部の基礎部分について、その造作を報告します。
今回は、都市部と山岳部の基礎部分について、その造作を報告します。- ■ 試験走行 その2 (2017/10/20)
 物置部屋のレイアウトについて、工事は着々と進んでいるが、その工事内容の報告をサボっています。 電力線やポイントコントロールの配線を実施し、大まかな地面作りとストラクチャ類を仮配置した状態で走行させた時の様子を報告します
物置部屋のレイアウトについて、工事は着々と進んでいるが、その工事内容の報告をサボっています。 電力線やポイントコントロールの配線を実施し、大まかな地面作りとストラクチャ類を仮配置した状態で走行させた時の様子を報告します- ■ 試験走行 その1 (2017/10/20)
 物置部屋のレイアウトについて、工事は着々と進んでいるが、その工事内容の報告をサボっています。 そこで、順不同ですが忘れないように記録しておくことにします。今回は、初めてレールが繋がった時に走行させた時の様子を報告します。
物置部屋のレイアウトについて、工事は着々と進んでいるが、その工事内容の報告をサボっています。 そこで、順不同ですが忘れないように記録しておくことにします。今回は、初めてレールが繋がった時に走行させた時の様子を報告します。- ■ 新しい配置 (2017/9/24)
 物置部屋のレイアウトについて、遂に折り返し点を通過することが出来た。 これからは新しいレイアウトに向けての工作が始まるのである。 最初に台となる棚やベースの配置を変更した。
物置部屋のレイアウトについて、遂に折り返し点を通過することが出来た。 これからは新しいレイアウトに向けての工作が始まるのである。 最初に台となる棚やベースの配置を変更した。- ■ 解体作業 (2017/9/22)
 ついに物置部屋のレイアウトの解体作業を始めた。 作るもの楽し、壊すのも楽しである。
ついに物置部屋のレイアウトの解体作業を始めた。 作るもの楽し、壊すのも楽しである。- ■ 大改造計画をスタートさせる (2017/9/11)
 物置部屋のレイアウトは、変形のドッグボーン形のレイアウトであり、解放感がいまいちのレイアウトである。 このため、このレイアウトの改造を本年度の目標のひとつとして、年の初めからあれこれ考えてきた。そして、この計画をいよいよスタートさせることにした。
物置部屋のレイアウトは、変形のドッグボーン形のレイアウトであり、解放感がいまいちのレイアウトである。 このため、このレイアウトの改造を本年度の目標のひとつとして、年の初めからあれこれ考えてきた。そして、この計画をいよいよスタートさせることにした。- ■ ミニレイアウト 遂に解体する (2017/9/11)
 ミニレイアウトを雪景色に改造したが、しかし、小生も終活を始める必要性を感じていたので、そのひとつとして、このミニレイアウトが対象とされたのである。
ミニレイアウトを雪景色に改造したが、しかし、小生も終活を始める必要性を感じていたので、そのひとつとして、このミニレイアウトが対象とされたのである。
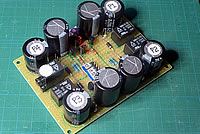
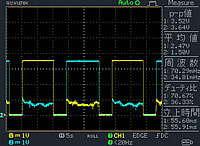
 自動運転システムの開発にてまどっているので、TOMIX の自動運転ユニット5563を調査し、参考にすることにした。 今回は、オシロスコープを使ってフィーダー回路の出力波形を調べてみた。
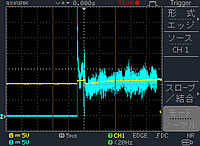
自動運転システムの開発にてまどっているので、TOMIX の自動運転ユニット5563を調査し、参考にすることにした。 今回は、オシロスコープを使ってフィーダー回路の出力波形を調べてみた。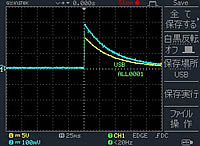 自動運転システムの開発にてまどっているので、TOMIX の自動運転ユニット5563を調査し、参考にすることにした。 今回は、オシロスコープを使ってポイント駆動回路の出力波形を調べてみた。
自動運転システムの開発にてまどっているので、TOMIX の自動運転ユニット5563を調査し、参考にすることにした。 今回は、オシロスコープを使ってポイント駆動回路の出力波形を調べてみた。- ■ TOMIXの自動運転ユニットNを調べる その1 (2017/8/26)
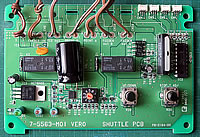 自動運転システムの開発にてまどっているので、TOMIX の自動運転ユニット5563を調査し、参考にすることにした。今回は、まず分解調査から実施した。
自動運転システムの開発にてまどっているので、TOMIX の自動運転ユニット5563を調査し、参考にすることにした。今回は、まず分解調査から実施した。- ■ 車載カメラで撮影 夜行列車 (2017/8/13)
 車載カメラを使って夜行列車の動画を撮影してみた。
車載カメラを使って夜行列車の動画を撮影してみた。- ■ 車載カメラで撮影 D51が牽引する貨物列車 (2017/8/7)
 ラズパイによる登山鉄道の自動運転システムが完成目前で足踏み状態であるので、ここらで少し頭を冷やすことにした。 そのひとつとして、レイアウトの状態を車載カメラを使って動画として撮影しておこうとするものである。
ラズパイによる登山鉄道の自動運転システムが完成目前で足踏み状態であるので、ここらで少し頭を冷やすことにした。 そのひとつとして、レイアウトの状態を車載カメラを使って動画として撮影しておこうとするものである。- ■ 道は遠し ( 2017/7/31)
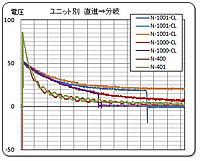
 ポイント駆動回路のパワーアップのために、3300μF のコンデンサを追加工作した。その結果をレイアウト上で確認したが、100点満点とは言えなかった。 まだまだ、どこかに問題がありそうである。 完成までには・・・・・・・・・・・・・・道は遠そうだ!
ポイント駆動回路のパワーアップのために、3300μF のコンデンサを追加工作した。その結果をレイアウト上で確認したが、100点満点とは言えなかった。 まだまだ、どこかに問題がありそうである。 完成までには・・・・・・・・・・・・・・道は遠そうだ!- ■ ポイント駆動回路の修正工作 ( 2017/7/27)
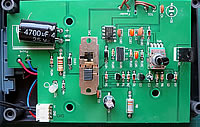
 ポイント駆動回路のパワーアップのために、「ポイント駆動回路のコンデンサー容量をアップさせる」で検討した結果をもとに、3300μF のコンデンサ追加工作を実施した。
ポイント駆動回路のパワーアップのために、「ポイント駆動回路のコンデンサー容量をアップさせる」で検討した結果をもとに、3300μF のコンデンサ追加工作を実施した。- ■ ポイント駆動回路のコンデンサー容量をアップさせる (2017/7/27)
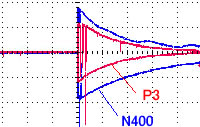
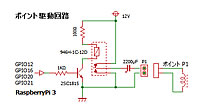
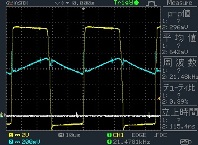
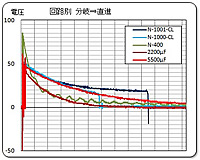 登山鉄道自動運転システムにおいて、ポイントの作動が不安定な状態がたびたび発生していた。 そこで駆動回路の電圧波形を観察した結果、我が設計のポイント駆動回路ではパワー不足の可能性があると判断し、コンデンサの容量アップによるパワーアップの検討を実施した。
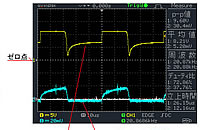
登山鉄道自動運転システムにおいて、ポイントの作動が不安定な状態がたびたび発生していた。 そこで駆動回路の電圧波形を観察した結果、我が設計のポイント駆動回路ではパワー不足の可能性があると判断し、コンデンサの容量アップによるパワーアップの検討を実施した。- ■ TOMIX製ユニットのポイント駆動回路出力波形の観察 (2017/7/23)
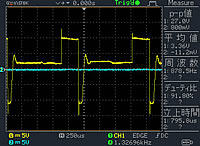
 駆動回路の電圧波形の観察により、我が設計のポイント駆動回路は、TOMIX製のパワーユニットのパワーよりも、倍以上も小さいことが判明した。 ポイントの作動が不安定な現象は、駆動回路のパワー不足の可能性があると判断し、パワーユニットでの出力波形を観察することにした。
駆動回路の電圧波形の観察により、我が設計のポイント駆動回路は、TOMIX製のパワーユニットのパワーよりも、倍以上も小さいことが判明した。 ポイントの作動が不安定な現象は、駆動回路のパワー不足の可能性があると判断し、パワーユニットでの出力波形を観察することにした。- ■ システムの制御状態の調査 ( 2017/7/21)
 改良したレールエンドをレイアウトに取り付けてテストを実施するも、システムとしてはどうもおかしいのである。 正常に作動してくれないのである。 そこで、どこかに問題あるのか、オシロを使ってセンサからの信号の出具合などを落ち着いて調査することにする。
改良したレールエンドをレイアウトに取り付けてテストを実施するも、システムとしてはどうもおかしいのである。 正常に作動してくれないのである。 そこで、どこかに問題あるのか、オシロを使ってセンサからの信号の出具合などを落ち着いて調査することにする。- ■ レイアウトでのテスト運用 ( 2017/7/15)
 合計6個の車止めが完成し、各ホームやレールエンドへの取り付けも何とか実施することが出来た。 そこで、これらのユニットをレイアウト上に設置し、正常に作動するのか、テスト運用を実施した。
合計6個の車止めが完成し、各ホームやレールエンドへの取り付けも何とか実施することが出来た。 そこで、これらのユニットをレイアウト上に設置し、正常に作動するのか、テスト運用を実施した。- ■ 車止め量産 ( 2017/7/14)
 車止め試作4号の量産(?)モデルをもとに、残りの4台を作ることにした。
車止め試作4号の量産(?)モデルをもとに、残りの4台を作ることにした。- ■ 車止め試作4号 ( 2017/7/12)
 試作3号まで工作してきて、何とか形になって来たので、見栄えを少し良くする工夫を実施することにした。 今回は試作2号をベースにして修正工作を実施て試作4号機として量産(?)モデルとすることにした。
試作3号まで工作してきて、何とか形になって来たので、見栄えを少し良くする工夫を実施することにした。 今回は試作2号をベースにして修正工作を実施て試作4号機として量産(?)モデルとすることにした。- ■ マイクロスイッチを使った車止め ( 2017/7/3)
 作るなら、もう少しコンパクトな構成にすべく、最適なマイクロスイッチを探すことにした。 狙いは小型化と小さな作動力のスイッチであることだ。 今回は、幾つかのマイクロスイッチを使って実験することにした。
作るなら、もう少しコンパクトな構成にすべく、最適なマイクロスイッチを探すことにした。 狙いは小型化と小さな作動力のスイッチであることだ。 今回は、幾つかのマイクロスイッチを使って実験することにした。- ■ 車止めを作ろう ( 2017/6/27)
 システムを大規模にかつ複雑にするほど構成するセンサやアクチュエータの信頼性がより重要となることを改めて痛感した。そこで車止めの試作品を作って見た。
システムを大規模にかつ複雑にするほど構成するセンサやアクチュエータの信頼性がより重要となることを改めて痛感した。そこで車止めの試作品を作って見た。- ■ レイアウトでの運行 ( 2017/6/22)
 いよいよ最終ステップに入って来た。 まずは、モニタやマウス無しでも運転開始や終了が出来るような細工を実施すると共に、レイアウトでの運行をテストすることにした。
いよいよ最終ステップに入って来た。 まずは、モニタやマウス無しでも運転開始や終了が出来るような細工を実施すると共に、レイアウトでの運行をテストすることにした。- ■ 運行プログラムの構築 その2 ( 2017/6/20)
 先回は、登山モジュールをレイアウト上から降ろして腰を据えてテストを実施した。 何とか走行テストが実施出来るようになったので、いよいよ4列車運行モデルのテストを実施しする。 そして新しくサン・モリッツ号も入線させた。
先回は、登山モジュールをレイアウト上から降ろして腰を据えてテストを実施した。 何とか走行テストが実施出来るようになったので、いよいよ4列車運行モデルのテストを実施しする。 そして新しくサン・モリッツ号も入線させた。- ■ 運行プログラムの構築 その1 ( 2017/6/17)
 登山モジュールの工作も走行テストが可能なレベルまで仕上がったので、そっそくレイアウト上に設置してテストを行ったが、不具合続きで混乱してしまった。 そこで、モジュールをレイアウト上から降ろして、腰を据えてテストを実施することにした。
登山モジュールの工作も走行テストが可能なレベルまで仕上がったので、そっそくレイアウト上に設置してテストを行ったが、不具合続きで混乱してしまった。 そこで、モジュールをレイアウト上から降ろして、腰を据えてテストを実施することにした。- ■ 登山鉄道モジュールの改造 ( 2017/6/16)
 制御回路とプログラムの概要が出来上がったので、今回からレイアウトを使った検討を開始した。 今回はまず、登山鉄道モジュールの手直しから始めた。
制御回路とプログラムの概要が出来上がったので、今回からレイアウトを使った検討を開始した。 今回はまず、登山鉄道モジュールの手直しから始めた。- ■ 複数の電車を同時に走らせる ( 2017/6/8)
- 異なる路線で複数の電車を同時に走らせる為には、二つのスレッドを並行して走らせなければならないのだ。 テスト用のレイアウトが準備できたので、このマルチスレッド・プログラムを検討した。
- ■ 複数の路線で走らせる ( 2017/6/8)
 システム検討もいよいよ佳境に入って来たが、最大の峠は、複数の電車を異なる路線で同時に走らせる方法をマスターする事と考えている。 まずはテスト用のレイアウトを準備する
システム検討もいよいよ佳境に入って来たが、最大の峠は、複数の電車を異なる路線で同時に走らせる方法をマスターする事と考えている。 まずはテスト用のレイアウトを準備する- ■ レールエンドの処理回路の改良 ( 2017/6/4)
 まだ残っていた問題点の改良を検討した。レールエンド処理回路について反対側のLEDがチラチラ点灯する問題である。機関車の後方ライトがチラチラと点灯する件と同じ問題であるので、対策案としてスナバ回路を追加することを検討してみた。
まだ残っていた問題点の改良を検討した。レールエンド処理回路について反対側のLEDがチラチラ点灯する問題である。機関車の後方ライトがチラチラと点灯する件と同じ問題であるので、対策案としてスナバ回路を追加することを検討してみた。- ■ 往復運転モデル2の制御 ( 2017/6/2)
 作成した制御回路を使用して少し複雑な往復運転モデルを作った。 基本となるいろいろな動作をプログラムに組み込んで、その動作確認をしようとするものである。 その制御内容を紹介しよう。
作成した制御回路を使用して少し複雑な往復運転モデルを作った。 基本となるいろいろな動作をプログラムに組み込んで、その動作確認をしようとするものである。 その制御内容を紹介しよう。- ■ 到着信号処理回路の改良 ( 2017/5/31)
 先回のテストでは、プログラムの不安定な状態がたびたび発生した。 これは通常のモータが発するノイズの影響で、誤動作が発生していると想定して、もう一度、到着センサを再チェックしてみることにした。
先回のテストでは、プログラムの不安定な状態がたびたび発生した。 これは通常のモータが発するノイズの影響で、誤動作が発生していると想定して、もう一度、到着センサを再チェックしてみることにした。- ■ 往復運動モデル2を作る ( 2017/5/31)
- ハード回路の工作が出来たので、この回路を使用して少し複雑な往復運動モデルを作ることにする。 基本となるいろいろな動作をプログラムに組み込んで、その動作確認をしようとするものである。
- ■ 制御回路の工作 ( 2017/5/28)
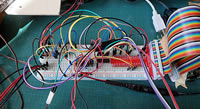
 システムを制御する電気回路について、各要素の機能の検証結果は良好であったので、ハード回路の工作を安心して進める事が出来ると判断し、いよいよ実回路の工作に取り掛かった。
システムを制御する電気回路について、各要素の機能の検証結果は良好であったので、ハード回路の工作を安心して進める事が出来ると判断し、いよいよ実回路の工作に取り掛かった。- ■ 往復運転モデルを作る その3 ( 2017/5/20)
 システムを制御する電気回路について、ハード回路を制作する前に各要素の機能をそれぞれ検証していく事にする。 今回は速度設定処理回路を検証する。
システムを制御する電気回路について、ハード回路を制作する前に各要素の機能をそれぞれ検証していく事にする。 今回は速度設定処理回路を検証する。- ■ 往復運転モデルを作る その2 ( 2017/5/18)
 システムを制御する電気回路について、ハード回路を制作する前に各要素の機能をそれぞれ検証していく事にする。 今回はCdS センサを使用した車両の通過センサを検証する。
システムを制御する電気回路について、ハード回路を制作する前に各要素の機能をそれぞれ検証していく事にする。 今回はCdS センサを使用した車両の通過センサを検証する。- ■ 往復運転モデルを作る その1 ( 2017/5/18)
 ポイント駆動回路での実験につづいて、レールエンドの信号処理と、給電回路の実験を実施する。 この場合は、往復運転モデルを作れば、それぞれの機能が確認できるはずである。
ポイント駆動回路での実験につづいて、レールエンドの信号処理と、給電回路の実験を実施する。 この場合は、往復運転モデルを作れば、それぞれの機能が確認できるはずである。- ■ ポイント駆動回路の検証 ( 2017/5/13)
 システムを制御する電気回路の全体像を設定したので、ハード回路を制作する前に各要素の機能をそれぞれ検証していく事にする。 まず最初に一番気にしているポイント駆動回路から実験した。 そしてフリーホイール・ダイオードの必要性を確認した。
システムを制御する電気回路の全体像を設定したので、ハード回路を制作する前に各要素の機能をそれぞれ検証していく事にする。 まず最初に一番気にしているポイント駆動回路から実験した。 そしてフリーホイール・ダイオードの必要性を確認した。- ■ 電気回路の検討 ( 2017/5/11)
 システムを制御するための電気回路を検討する。 このシステムは、色々な要素を組み合わせて構成するが、それぞれの構成要素は今までの実施例や雑誌などを参考にして設定していく事にする。
システムを制御するための電気回路を検討する。 このシステムは、色々な要素を組み合わせて構成するが、それぞれの構成要素は今までの実施例や雑誌などを参考にして設定していく事にする。- ■ エンドレールでの表示と信号処理 ( 2017/5/9)
 エンドレールへの通電状態を表示する装置を自作することにするとともに、表示だけでなく、自動運転のための信号処理機能も付加することにした。 追記があります。(2017/5/11)
エンドレールへの通電状態を表示する装置を自作することにするとともに、表示だけでなく、自動運転のための信号処理機能も付加することにした。 追記があります。(2017/5/11)- ■ 緩衝器付エンドレールでの自動停止装置 ( 2017/5/1)
 登山鉄道の自動運転システムとして、構想にて説明したアイディアをひとつずつ検討していく事にしょう。 まず初めに、システム不具合時に於いてもレールエンドに激突することが無いよう、TOMIX のエンドレールEを使った防止策から始めることにする。
登山鉄道の自動運転システムとして、構想にて説明したアイディアをひとつずつ検討していく事にしょう。 まず初めに、システム不具合時に於いてもレールエンドに激突することが無いよう、TOMIX のエンドレールEを使った防止策から始めることにする。- ■ TOMIX製のC11-325号機の分解調査 (2017/4/21)
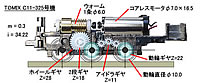 TOMIX製のC11-325号機の分解調査を実施し、スリップ率などの特性を測定するつもりであったが・・・・・・、何故だか嫌われてしまった。
TOMIX製のC11-325号機の分解調査を実施し、スリップ率などの特性を測定するつもりであったが・・・・・・、何故だか嫌われてしまった。- ■ KATO製とTOMIX製の最新式C11型の性能比較 (2017/4/17)
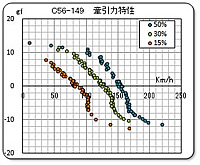
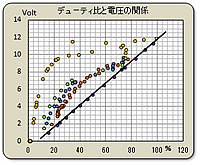
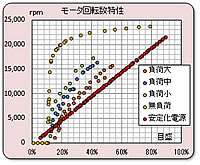
 奇しくもほぼ同時発売となった、KATO製とTOMIX製の最新式C11型蒸気機関車の性能比較を実施してみよう。そして、テーマにして来たPWM制御によるパワーユニットの調査と合わせて、両者の性能特性をPWM制御方式のパワーユニットを使って比較実験してみた。
奇しくもほぼ同時発売となった、KATO製とTOMIX製の最新式C11型蒸気機関車の性能比較を実施してみよう。そして、テーマにして来たPWM制御によるパワーユニットの調査と合わせて、両者の性能特性をPWM制御方式のパワーユニットを使って比較実験してみた。- ■ PWM制御と手作り室内灯 (2017/4/13)
 本当にコンデンサの取り付け位置の問題なのかの確認と、PWM制御に影響を与えないコンデンサ容量はどれくらいかを実験してみることにする。
本当にコンデンサの取り付け位置の問題なのかの確認と、PWM制御に影響を与えないコンデンサ容量はどれくらいかを実験してみることにする。- ■ PWM制御とコアレスモータと室内灯の三つ巴 (2017/4/12)
 レイアウトにてこのC11-325号機を使って旧型客車を牽引させようとした時、さらに室内灯も関係することに気付いた。PWM制御方式のパワーパックとコアレスモータ搭載の動力車の関係は、さらに室内灯も関係する三つ巴の状態を考慮しなければならない様相となった。 原因は写真に示す室内灯ユニットにある事が分かった。
レイアウトにてこのC11-325号機を使って旧型客車を牽引させようとした時、さらに室内灯も関係することに気付いた。PWM制御方式のパワーパックとコアレスモータ搭載の動力車の関係は、さらに室内灯も関係する三つ巴の状態を考慮しなければならない様相となった。 原因は写真に示す室内灯ユニットにある事が分かった。- ■ TOMIX製のC11-325号機の性能特性 (2017/4/2)
 TOMIX製のC11-325号機がやっと発売された。 そこで早速性能特性を測定してみたので報告する。 同じメーカーの動力車とパワーユニットの組み合わせで測定したのだ。 きっと満足できる性能を発揮してくれると期待して!
TOMIX製のC11-325号機がやっと発売された。 そこで早速性能特性を測定してみたので報告する。 同じメーカーの動力車とパワーユニットの組み合わせで測定したのだ。 きっと満足できる性能を発揮してくれると期待して!
- ■ WebIOPiを用いたPCやスマホとの連携 その2 (2017/3/21)
 今、RaspberryPiに挑戦している。 先回は、スマホやPCから制御する方法を勉強したのが、さらにPWM制御を使う方法を学ぼう。
今、RaspberryPiに挑戦している。 先回は、スマホやPCから制御する方法を勉強したのが、さらにPWM制御を使う方法を学ぼう。- ■ R-7 WebIOPiを用いたPCやスマホとの連携 (2017/3/19)
 今、RaspberryPiに挑戦している。 今回は、いよいよスマホやPCから制御する方法を勉強する。 鉄道模型でのリモート・コントロールやデータ収集などの夢を描きながら勉強することにしよう。 訂正があります。 改訂版を作成しました。(3/20)
今、RaspberryPiに挑戦している。 今回は、いよいよスマホやPCから制御する方法を勉強する。 鉄道模型でのリモート・コントロールやデータ収集などの夢を描きながら勉強することにしよう。 訂正があります。 改訂版を作成しました。(3/20)- ■ R-6 PWMによるサーボモータの制御 (2017/3/17)
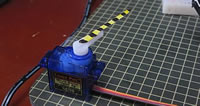 今、RaspberryPiに挑戦している。 今回は先回に引き続いてPWM 制御の演習を実施した。 サーボモータの角度制御にはこのPWM 制御が用いられている。 そこで、この方法を使って鐡道模型の踏切に活用出来るのではと考えてトライしてみた。
今、RaspberryPiに挑戦している。 今回は先回に引き続いてPWM 制御の演習を実施した。 サーボモータの角度制御にはこのPWM 制御が用いられている。 そこで、この方法を使って鐡道模型の踏切に活用出来るのではと考えてトライしてみた。- ■ R-5 PWMの利用 (2017/3/15)
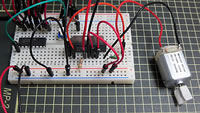 今、RaspberryPiに挑戦している。 今回はPWM 制御について演習を実施した。 ラズパイを鉄道模型に活用しようとした場合には、このPWM制御は必要となるので、しっかり演習しておこう。
今、RaspberryPiに挑戦している。 今回はPWM 制御について演習を実施した。 ラズパイを鉄道模型に活用しようとした場合には、このPWM制御は必要となるので、しっかり演習しておこう。- ■ R- 4 I2C通信の演習 (2017/3/13)
 今、RaspberryPiに挑戦している。 今回は I2C 通信の演習を実施した。
今、RaspberryPiに挑戦している。 今回は I2C 通信の演習を実施した。- ■ R-3 AD変換とSPI通信 (2017/3/8)
 Windows10 とファイルのやり取りを容易化するため、今回はファイルサーバーをインストールした。 そしてAD変換とSPI通信の演習も実施した。
Windows10 とファイルのやり取りを容易化するため、今回はファイルサーバーをインストールした。 そしてAD変換とSPI通信の演習も実施した。- ■ R-2 タクトスイッチによる入力 (2017/3/6)
- 今、RaspberryPiに挑戦している。 今回は教則本の5章、タクトスイッチによる入力をテストする。
- ■ R-1 RaspberryPi に挑戦 (2017/3/6)
 今、RaspberryPiに挑戦している。教則本とした「 RaspberryPi で学ぶ電子工作」 に従ってテストを実施し、その要点を順次報告していきます。
今、RaspberryPiに挑戦している。教則本とした「 RaspberryPi で学ぶ電子工作」 に従ってテストを実施し、その要点を順次報告していきます。- ■ 登山電車の自動運転 構想 (2017/3/1)
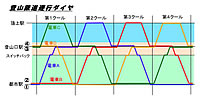 物置部屋のレイアウトについて、大幅改造をしてみたいなとあれこれ思案中であるが、その一環として登山電車の自動運転の改良もそのテーマのひとつである。
物置部屋のレイアウトについて、大幅改造をしてみたいなとあれこれ思案中であるが、その一環として登山電車の自動運転の改良もそのテーマのひとつである。- ■ パワーユニットを知ろう KATOのC56とPWM制御 (2017/2/17)
 パワーユニットを知ろうの第10弾として、TOMIX製パワーユニットN-1001-CL を使って動力車を走らせた場合の特性を測定することにした。
パワーユニットを知ろうの第10弾として、TOMIX製パワーユニットN-1001-CL を使って動力車を走らせた場合の特性を測定することにした。- ■ パワーユニットを知ろう PWM制御とコアレスモータ その2 (2017/2/4)
 パワーユニットを知ろう の第9弾として、TOMIX製パワーユニットN-1001-CL を使った場合のコアレスモータの特性を解析してみた。 その結果、自分なりの屁理屈をまとめてみて、何だか理解出来たような気がしたので、ここに報告する。
パワーユニットを知ろう の第9弾として、TOMIX製パワーユニットN-1001-CL を使った場合のコアレスモータの特性を解析してみた。 その結果、自分なりの屁理屈をまとめてみて、何だか理解出来たような気がしたので、ここに報告する。- ■ パワーユニットを知ろう PWM制御とコアレスモータ (2017/2/3)
 パワーユニットを知ろう の第8弾として、TOMIX製パワーユニットN-1001-CL を使ってコアレスモータの特性を測定した。PWM制御とコアレスモータは相性が悪いと言われていたが、測定データにも今までとは異なった様相を呈しており、その動きを理解するのに四苦八苦している。
パワーユニットを知ろう の第8弾として、TOMIX製パワーユニットN-1001-CL を使ってコアレスモータの特性を測定した。PWM制御とコアレスモータは相性が悪いと言われていたが、測定データにも今までとは異なった様相を呈しており、その動きを理解するのに四苦八苦している。- ■ パワーユニットを知ろう PWM制御とコアレスモータ 波形観察 (2017/1/31)
 パワーユニットを知ろう の第7弾として、TOMIX製パワーユニットN-1001-CL を使って、コアレスモータを駆動してみた。PWM 制御とコアレスモータは相性が悪いと言われていたが、実際にはどうなのかを波形観察から見てみることにしょう。
パワーユニットを知ろう の第7弾として、TOMIX製パワーユニットN-1001-CL を使って、コアレスモータを駆動してみた。PWM 制御とコアレスモータは相性が悪いと言われていたが、実際にはどうなのかを波形観察から見てみることにしょう。- ■ パワーユニットを知ろう TOMIX製パワーユニットN-1001-CL の分解 (2017/1/21)
 パワーユニットを知ろう の第6弾として、TOMIX製パワーユニットN-1001-CL を分解し、フリーホイールダイオードがどのように実装されてるのか確認してみるkとにした。
パワーユニットを知ろう の第6弾として、TOMIX製パワーユニットN-1001-CL を分解し、フリーホイールダイオードがどのように実装されてるのか確認してみるkとにした。- ■ パワーユニットを知ろう 電圧と電流の波形 (2017/1/19)
 パワーユニットを知ろう の第5弾として、負荷状態におけるパワーユニットの電圧と電流の波形を調べることにした。そして、逆起電力とフリーホール現象の違いを理解することが出来た。
パワーユニットを知ろう の第5弾として、負荷状態におけるパワーユニットの電圧と電流の波形を調べることにした。そして、逆起電力とフリーホール現象の違いを理解することが出来た。- ■ パワーユニットを知ろう TOMIXのパワーユニット N-1001-CL (2017/1/15)
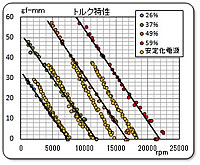 パワーユニットを知ろう の第3弾として、TOMIX 製のパワーユニット N-1001-CL のトルク特性を調べることにした。
パワーユニットを知ろう の第3弾として、TOMIX 製のパワーユニット N-1001-CL のトルク特性を調べることにした。- ■ パワーユニットを知ろう TOMIXのパワーユニット N-1001-CL (2017/1/10)
 パワーユニットを知ろう の第3弾として、TOMIX 製のパワーユニット N-1001-CL の速度特性を調べることにした。
パワーユニットを知ろう の第3弾として、TOMIX 製のパワーユニット N-1001-CL の速度特性を調べることにした。- ■ パワーユニットを知ろう TOMIXのパワーユニット (2017/1/9)
 パワーユニットを知ろう の第2弾として、 2種類のTOMIX 製のパワーユニットを調べた。 測定環境は前回と同じ状態で測定する。
パワーユニットを知ろう の第2弾として、 2種類のTOMIX 製のパワーユニットを調べた。 測定環境は前回と同じ状態で測定する。- ■ パワーユニットを知ろう KATOのスタンダードS (2017/1/8)
 KATO製のパワーパック Standsrd S は、交流アダプター(AC - AC ADAPTOR)を使用して全波整流したままのパワーユニットであることが分かった。 このため、その脈動成分はしっかりと残っており、我がドクターカーとは全く相性が合わないことも納得である。
KATO製のパワーパック Standsrd S は、交流アダプター(AC - AC ADAPTOR)を使用して全波整流したままのパワーユニットであることが分かった。 このため、その脈動成分はしっかりと残っており、我がドクターカーとは全く相性が合わないことも納得である。- ■ XBeeを搭載したドクターカー その4 内回り線を測定する (2016/12/27)
 先回は外回り線を測定したので、今回は内周り線を測定することにした。 さらに、処理ソフトの改善と、KATO 製のパワーユニットを使用した場合でもチェックしてみたが、思わぬ結果になってしまった。
先回は外回り線を測定したので、今回は内周り線を測定することにした。 さらに、処理ソフトの改善と、KATO 製のパワーユニットを使用した場合でもチェックしてみたが、思わぬ結果になってしまった。- ■ XBeeを搭載したドクターカー その3 レイアウトでの測定 (2016/12/24)
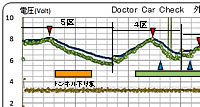 いよいよ無線通信モジュール XBee を搭載したドクターカーを使って、実際のレイアウトを走行させてみた。 その結果を報告する。
いよいよ無線通信モジュール XBee を搭載したドクターカーを使って、実際のレイアウトを走行させてみた。 その結果を報告する。- ■ Arduino のタイマーは正確だった (2016/12/22)
 先回報告した中で、時刻計測におけるタイマーの値に疑問があり、Arduino のタイマー処理を疑っていたが、その後の検討結果、自分の考察は間違いであり、疑っていたArduino のタイマー処理は正確であったことが判明した。 その結論に至った経緯を説明しよう。
先回報告した中で、時刻計測におけるタイマーの値に疑問があり、Arduino のタイマー処理を疑っていたが、その後の検討結果、自分の考察は間違いであり、疑っていたArduino のタイマー処理は正確であったことが判明した。 その結論に至った経緯を説明しよう。- ■ XBeeを搭載したドクターカー その1 (2016/12/18)
 無線通信モジュール XBee を使用してモータ端子電圧のデータをパソコンに飛ばし、パソコンにて処理する方法が考えられる。 このXBee の使用に関しては既に経験済みであるが、線路の位置データをどうやって取得するのかも問題であっ。 今回はこのテーマに挑戦することにた。
無線通信モジュール XBee を使用してモータ端子電圧のデータをパソコンに飛ばし、パソコンにて処理する方法が考えられる。 このXBee の使用に関しては既に経験済みであるが、線路の位置データをどうやって取得するのかも問題であっ。 今回はこのテーマに挑戦することにた。